编写小车控制程序
小车控制程序主要分为两部分,小车控制程序和远程遥控程序。小车控制程序用来控制前进、后退、左传弯、右转弯、停止等动作。而远程遥控程序用来遥控小车,可以在电脑端控制,但是不太方便。还有一种选择是可以通过手机遥控小车,可以通过蓝牙通信实现。如果你看到了源代码,就会发现小车程序非常简单易懂。
下面先介绍小车控制部分,还记得上一节介绍的如何通过树莓派GPIO输出信号控制控制小车运动方式吗?
| GPIO 13/15 | GPIO 31 | GPIO 33 | GPIO 35 | GPIO 37 | 小车运动方式 |
|---|---|---|---|---|---|
| 高电平 | 高电平 | 低电平 | 高电平 | 低电平 | 前进 |
| 高电平 | 低电平 | 高电平 | 低电平 | 高电平 | 后退 |
| 高电平 | 低电平 | 高电平 | 高电平 | 低电平 | 左转 |
| 高电平 | 高电平 | 低电平 | 低电平 | 高电平 | 右转 |
| 低电平 | - | - | - | - | 停止 |
通过给GPIO 13, 15输出高电平,配合GPIO 31、33、35、 37端口高或低电平,可以控制小车运动起来。通过给GPIO 13、15输出低电平,可以让小车停下来。小车的速度是通过频率和占空比2个参数控制的,其中频率是指高电平脉冲波动的频率,占空比是指一个波动周期中高电平的时长占比。
如下图所示,3.3V是高电平,0V是低电平,图中3个高电平脉冲频率是一样的,占空比第一个最小,第三个最大。不能理解输出的高电平脉冲,频率越高、占空比越大,则小车动力动力越大,跑得也越快。
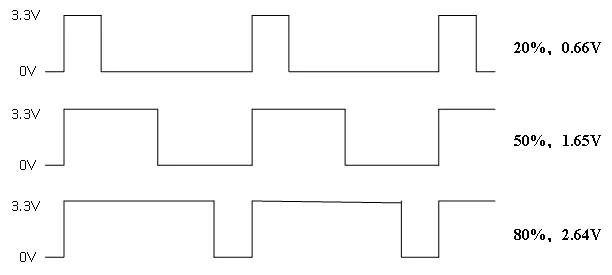
但是这两个参数的值都要设定在合理范围内,超过合理范围是不生效的。占空比因为是百分比,所以范围是[0.0, 100.0],频率值可以在具体调试过程中,找到相对比较合理的范围值。下面给出小车控制程序。
import time
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BOARD) # 设置针脚编号模式为1~40顺序编号
GPIO.setwarnings(False)
########电机驱动接口定义#################
ENA = 13 # L298使能A
ENB = 15 # L298使能B
IN1 = 31 # 电机接口1
IN2 = 33 # 电机接口2
IN3 = 35 # 电机接口3
IN4 = 37 # 电机接口4
frequency = 30 # 高电平脉冲频率
dc = 50 # 占空比,高电平时间占比
#########电机初始化为LOW#################
GPIO.setup(ENA, GPIO.OUT, initial=GPIO.LOW)
ENA_pwm = GPIO.PWM(ENA, frequency)
ENA_pwm.start(0)
ENA_pwm.ChangeDutyCycle(dc)
GPIO.setup(IN1, GPIO.OUT, initial=GPIO.LOW)
GPIO.setup(IN2, GPIO.OUT, initial=GPIO.LOW)
GPIO.setup(ENB, GPIO.OUT, initial=GPIO.LOW)
ENB_pwm = GPIO.PWM(ENB, frequency)
ENB_pwm.start(0)
ENB_pwm.ChangeDutyCycle(dc)
GPIO.setup(IN3, GPIO.OUT, initial=GPIO.LOW)
GPIO.setup(IN4, GPIO.OUT, initial=GPIO.LOW)
def Motor_Forward():
print( 'motor forward' )
GPIO.output(ENA, True)
GPIO.output(ENB, True)
GPIO.output(IN1, False)
GPIO.output(IN2, True)
GPIO.output(IN3, False)
GPIO.output(IN4, True)
def Motor_Backward():
print( 'motor_backward' )
GPIO.output(ENA, True)
GPIO.output(ENB, True)
GPIO.output(IN1, True)
GPIO.output(IN2, False)
GPIO.output(IN3, True)
GPIO.output(IN4, False)
def Motor_TurnLeft():
print( 'motor_turnleft' )
GPIO.output(ENA, True)
GPIO.output(ENB, True)
GPIO.output(IN1, True)
GPIO.output(IN2, False)
GPIO.output(IN3, False)
GPIO.output(IN4, True)
def Motor_TurnRight():
print( 'motor_turnright' )
GPIO.output(ENA, True)
GPIO.output(ENB, True)
GPIO.output(IN1, False)
GPIO.output(IN2, True)
GPIO.output(IN3, True)
GPIO.output(IN4, False)
def Motor_Stop():
print( 'motor_stop' )
GPIO.output(ENA, False)
GPIO.output(ENB, False)
GPIO.output(IN1, False)
GPIO.output(IN2, False)
GPIO.output(IN3, False)
GPIO.output(IN4, False)
程序整体逻辑非常简洁易懂,可以参考注释。然后现在安装下树莓派蓝牙相关软件。
sudo apt-get install pi-bluetooth bluez bluez-firmware blueman
sudo apt-get install libbluetooth-dev
sudo reboot
pip install pybluez
查看下蓝牙服务是否正常。
systemctl status bluetooth
修改下面的配置
sudo vi /lib/systemd/system/bluetooth.service
把
ExecStart=/usr/lib/bluetooth/bluetoothd
改为
ExecStart=/usr/lib/bluetooth/bluetoothd -C
刚刚修改的地方下面增加一行
ExecStartPost=/usr/bin/sdptool add SP
重启蓝牙服务
sudo systemctl daemon-reload
sudo systemctl restart bluetooth
使树莓派蓝牙可被手机扫描到
sudo hciconfig hci0 piscan
接下来编写小车蓝牙通信代码,这样就可以通过手机蓝牙和小车配对,并连接上小车进行操控,下面给出相关代码。
import bluetooth
##########蓝牙连接接收命令##################
server_sock=bluetooth.BluetoothSocket( bluetooth.RFCOMM )
port = 1
server_sock.bind(('', port))
server_sock.listen(1)
# 只有一个客户端可以连接上,并控制小车
# 小车进程不会退出,直到主动kill进程
while True:
print('ready accept connection...')
# 接受客户端连接
client_sock, address = server_sock.accept()
print('Accepted connection from ', address)
while True:
try:
# 读取命令字符
action = int ( client_sock.recv(1024) )
print('received action [%s]' % action)
# 控制小车执行命令
if action == 1: # 前进
Motor_Forward()
elif action == 2: # 后退
Motor_Backward()
elif action == 3: # 左转
Motor_TurnLeft()
time.sleep(0.05)
Motor_Stop()
elif action == 4: # 右转
Motor_TurnRight()
time.sleep(0.05)
Motor_Stop()
elif action == 5: # 停止
Motor_Stop()
elif action == 6: # clockwise circle
Motor_TurnRight()
elif action == 7: # anti-clockwise circle
Motor_TurnLeft()
else: # 未知命令,小车停止
Motor_Stop()
except:
# 遇到意外,小车停止,断开蓝牙连接
print('except...')
Motor_Stop()
break
#finally:
# 断开客户端连接
client_sock.close()
print('close connection from ', address)
蓝牙通信暂时采用的是经典蓝牙RFCOMM协议,目前来说足够用了。找个Android手机和小车进行蓝牙配对,然后在Android手机上装个蓝牙串口App,就可以连接上小车进行远程遥控了。通过手机端蓝牙串口发送相应指令(上面代码指令为数字1~7,命令可以自定义),小车控制程序接收到就会执行相应指令控制小车运动。
小车控制代码部署到小车上面,就可以调试小车功能了,调整完毕后可以让小车控制程序开机自启动,这样打开小车后,手机就可以连接上来进行遥控了。
ssh登录上小车,输入
$crontab -e
添加下面一行,退出保存,重启树莓派
@reboot cd /home/pi/pywork/works/car; python3 car.py &
OK,现在小车控制程序已经调试并部署完成了,给小车锂电池组和充电宝充好点,带上小车到附近广场测试一番吧!